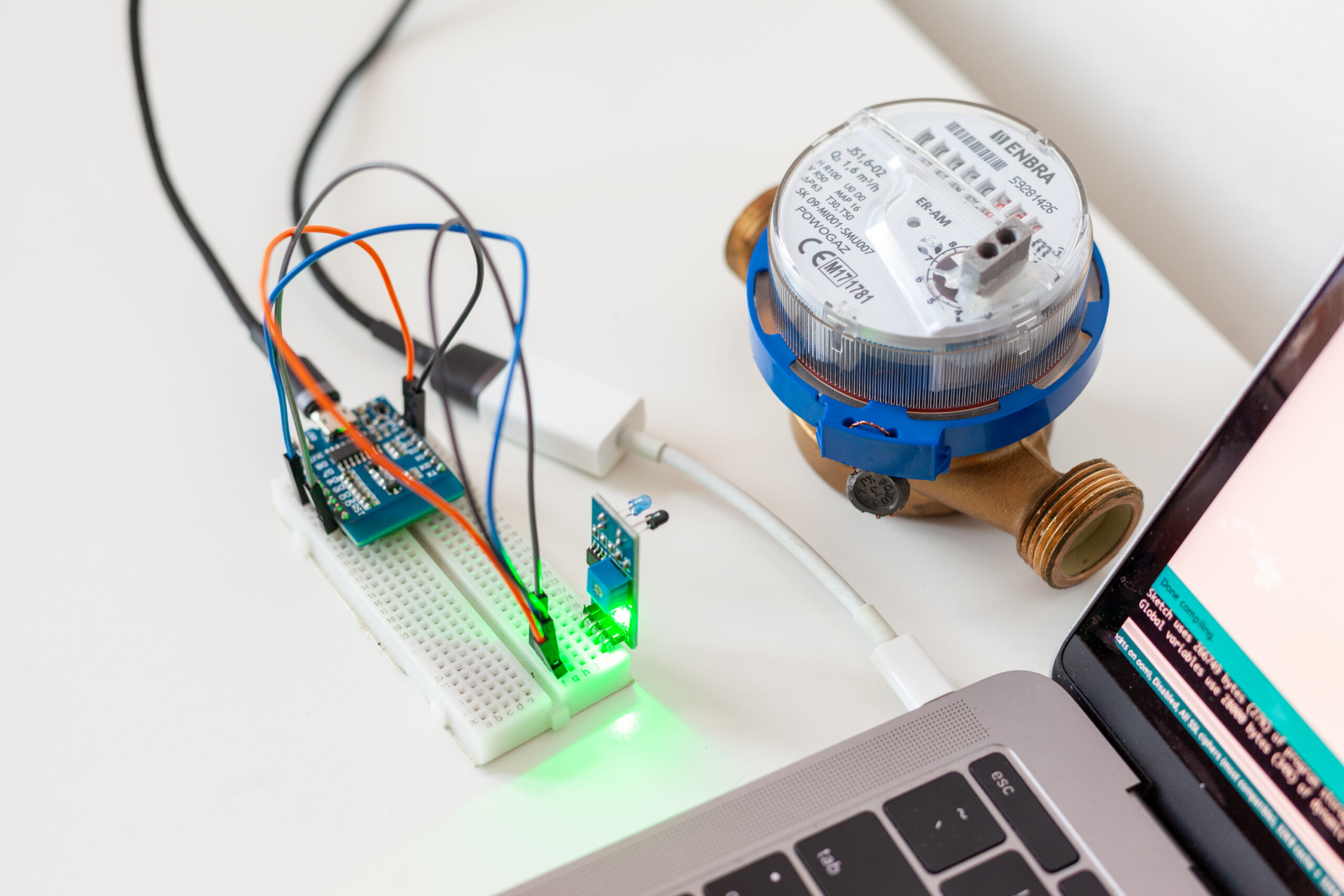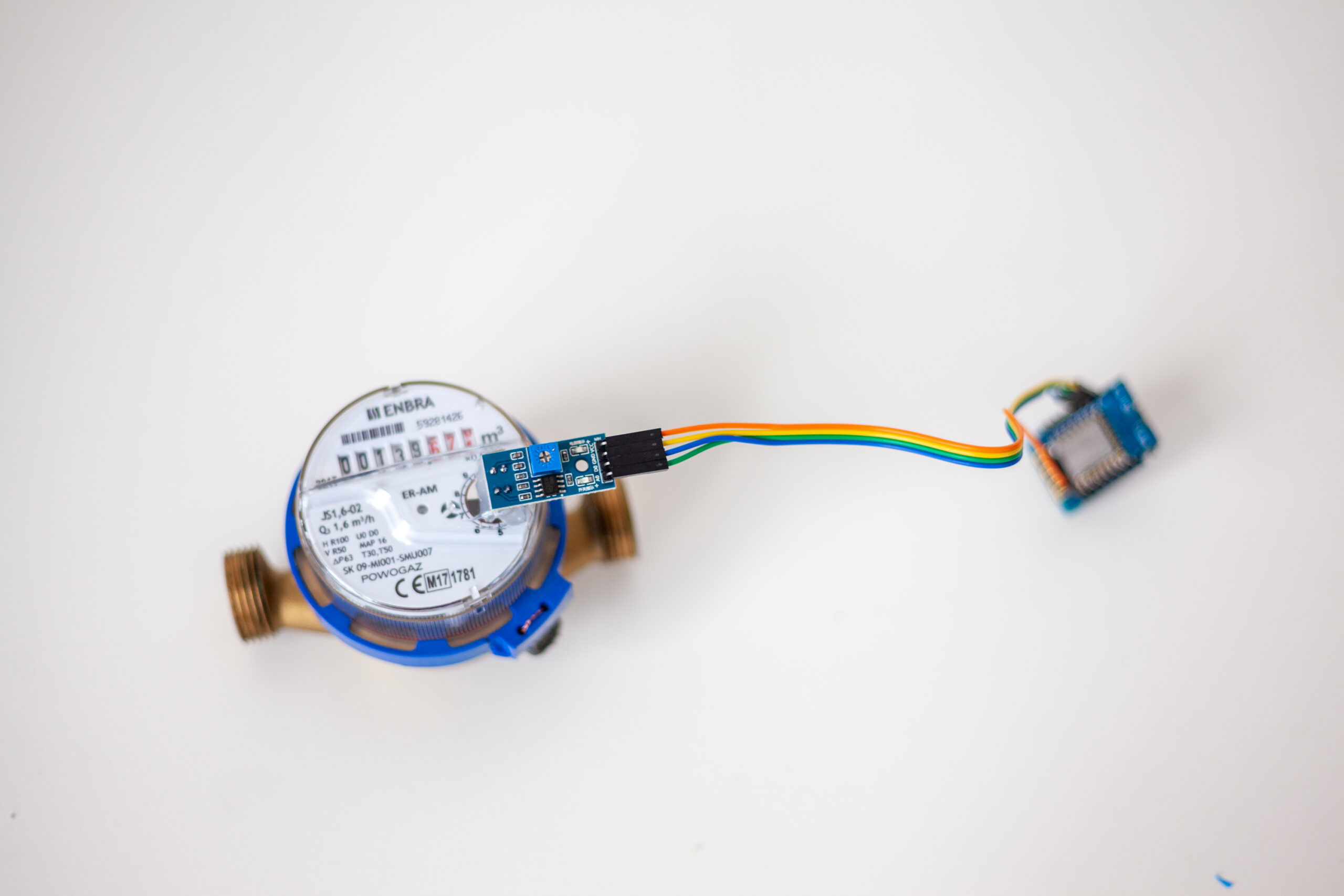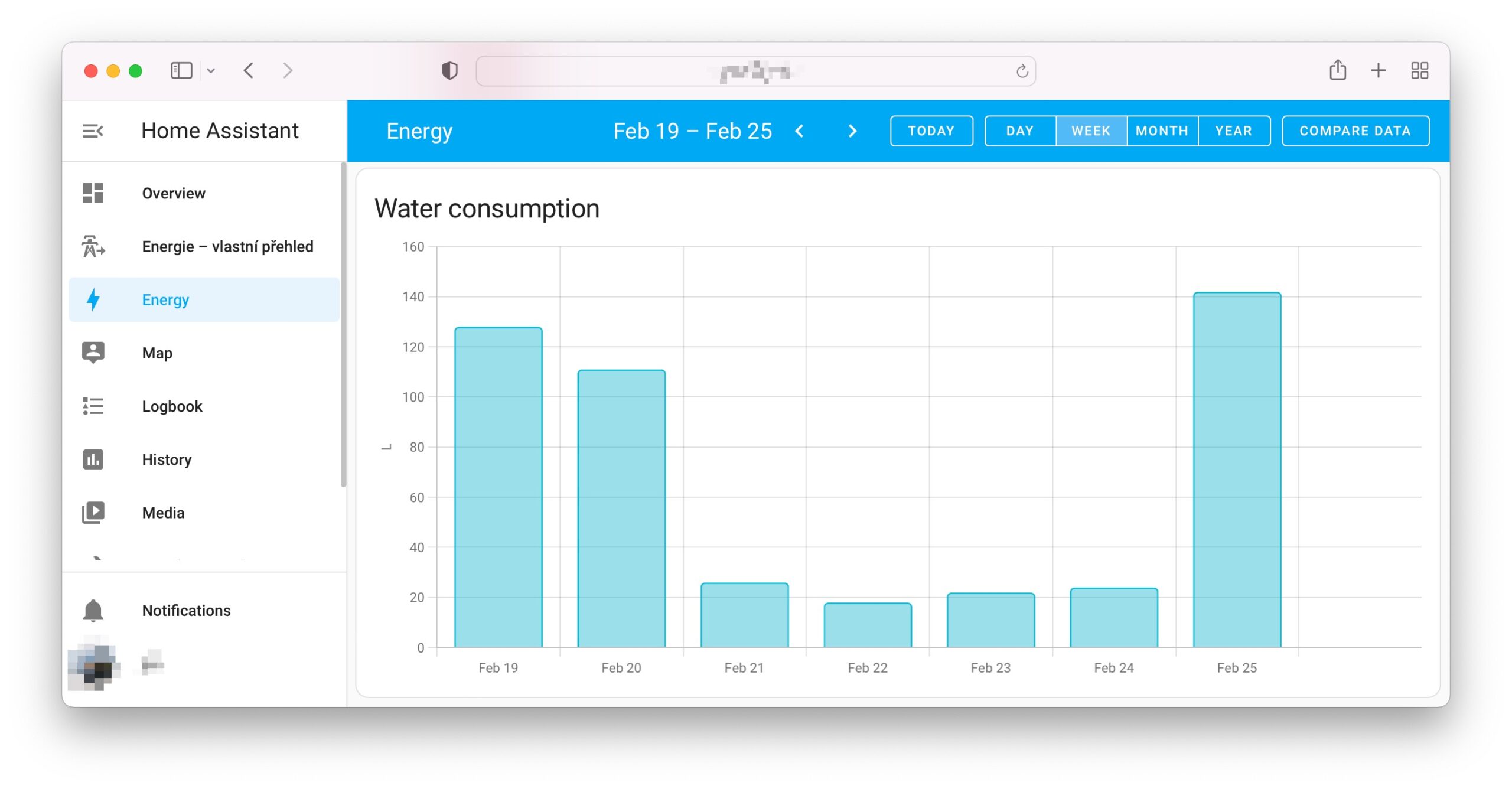
Toto je druhý článek ze tří o měření spotřeby vody s využitím optického senzoru TCRT5000 připíchlým na vodoměru, a vývojové desky Wemos D1 Mini, která bude informace o proteklé vodě posílat do Home Assistantu. V předchozím článku jsme skončili u toho, že jsme měli senzor TCRT5000 uchycený na vodoměru a nastavený tak, aby se spínal s každým proteklým litrem. Nyní je na řadě tuto informaci dostat do Home Assistant.
Jak dostat impulzy od vodoměru do HA?
V minulém článku jsme použili Arduino IDE k nahrání krátkého kódu, který četl výstupy ze senzoru a vypisoval je. Pokud byste uměli programovat, tak si v Arduino IDE můžete doprogramovat všechno ostatní – připojení k WiFi, odesílání impulzů třeba přes MQTT apod.
Ale zaprvé i kdybych programovat uměl (neumím), tak by to bylo mega zbytečné práce, protože existují projekty jako ESPHome, s jejichž pomocí je nastavení, integrace, a následná správa podobných senzorů výrazně jednodušší.